Подпишитесь на нашу рассылку, чтобы получать последние новости и специальные предложения.
Роботизация процесса сварки
Особенности роботизированного процесса сварки
В результате использования робототехники в сварочном производстве представляется возможным автоматизировать выполнение швов любой формы, а также большого числа коротких швов, различным образом расположенных в пространстве; выполнять дуговой сваркой швы с любой формой линии стыка в горизонтальном (нижнем) положении. Это позволяет применять наиболее производительные режимы сварки с формированием сварных швов с минимальным отклонением геометрических размеров. По сравнению с автоматической сваркой роботизация обеспечивает рост производительности, экономию сварочных материалов, электроэнергии и уменьшение сварочных деформаций. Сокращается потребность в специальном сварочном оборудовании и в изготовлении специальных и специализированных станков, установок и машин для сварки.
Проблема роботизации сварочного производства включает в себя выбор универсальных или компоновку специализированных средств робототехники и комплексное решение технико-экономических вопросов, связанных с внедрением средств робототехники на конкретном сварочном производстве.
Требования, предъявляемые к средствам роботизации сварочных процессов при различных способах сварки, обусловливаются особенностями сварных конструкций, которые по геометрическим признакам можно подразделить:
• на плоскостные (полотнища, панели с элементами жесткости);
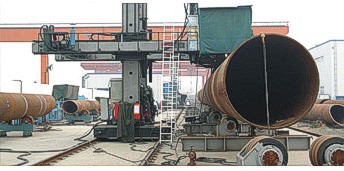
• листовые типа тел вращения (резервуары, цилиндры и т. п.);
• каркасно-решетчатые (плоские и объемные фермы, каркасы кабин транспортных и сельскохозяйственных машин, каркасы шкафов, блоков и пультов управляющей аппаратуры, ограждения и другие конструкции, состоящие из стержневых элементов различного профиля).
Стереосистема пространственной коррекции траектории движения робота AID-800
Бинокулярная СТЗ фирмы Automatix Robotic Systems (США) по двум изображениям методом триангуляции находит трехмерные координаты крайних точек прорези в середине вкладыша и по известным его размерам определяет траекторию будущего сварного шва. Процесс от начала движения робота к рабочей позиции до начала сварки занимает менее 6 с. Вычислительная часть системы строится на базе микропроцессора Motorola 6800. Для программирования СТЗ и робота оператор может пользоваться удобным языком RAIL. Вся процедура калибровки и обучения системы для работы с новым классом деталей занимает не более 1 ч.